

 公司新闻
公司新闻 技术资讯
技术资讯 媒体报道
媒体报道
基本信息
这是电力推进硬科技小课堂的第一个系列:不平衡系列的第一讲:不平衡的基本原理和应用。
以下课程材料由中船赛思亿邵博士编写,课程内容主要来自于赛思亿内部文档《G117“不平衡”的基本原理和应用》,作为不平衡系列连续剧的开题第一讲。

邵诗逸 博士
中船赛思亿副总经理
英国剑桥大学博士,研究员级高工
中国船级社技术委员会机电技术委员
研究方向为船舶自动化及变频控制技术
发表SCI论文15篇,授权专利73项
01
背景介绍
“三相不平衡”是一种大家常常挂在嘴边的概念。那么究竟什么是不平衡?如何科学地定义不平衡度?不平衡会带来什么样的困扰?这三个灵魂拷问,相信很多有经验的工程师并不能很好地回答。
三相不平衡的一系列理论在电力推进的应用中起到重要作用,主要在以下两个方面:
01. 针对三相系统的错相或者缺相的判断
02. 对一些发电机或者电动机的内部短路形成差动保护
本文档的目的,就是解决上述的问题。特别是试图采用数学和直观结合的方式展现不平衡的美。
02
课程服用指南
不同人群对于不同课程内容的感受力和接受度不一样,会形成三种不同的疗效和副作用。
已经有牢固电气工程和电机控制基础知识的(例如乌博士或者电气工程专业的资深科研人员)
-
疗效:并没什么卵用,课程基本就是教科书内容的通俗版,最多欣赏下本文表达方法。
-
副作用:几乎无,有点浪费时间,还不如刷抖音看大长腿。
对电气工程有一定了解,并且在相关专业行业任职
(比如说大量的电气工程师,甚至对船舶电力推进相关工作的工程师,但理论学的并不那么扎实或者忘了大部分的)
-
疗效:基本能够读完,可以明显加深对于三相不平衡的理解,甚至开了一扇新的窗口。
-
副作用:觉得自己不懂的东西肯定又增加了,甚至会找出一些专业课数据服用。
对电气工程稍有了解,在相关行业内但不一定从事技术工作的
-
疗效:本文前半部分应该能读完,应该会对部分基础知识能够接受或吸收,甚至可以部分的防范被骗。
-
副作用:有可能读不完,但是没关系,不读完不表示没收获,实在不行就跳到结论。
除了第一类之外,对第二类第三类人群的建议是,只要是和行业相关,读了一定会有收获,邵博士本身入门矢量控制时,读了一本红皮书(充斥着让人不懂的数学,英文书有几页一个英文没有,全是公式),读了三遍才算真正入门,有着打通任督二脉的感觉。
乌博士读了一遍,就说他懂了,这就导致他的科研成就有了一定的瓶颈。
如果问邵博士我是读哪一遍书才懂的,我不好说,但是从我翻开那本书的第一课起,就开始有了收获。
这也就是这一类课程的主题:懂与不懂,都是收获。
03
什么是不平衡
三相不平衡,事实上是一种非常主观的定义。不平衡可以是三相电流不平衡,三相电压不平衡,甚至是三相磁链不平衡。本文一般用三相电压不平衡来进行一般性的描述。
有人认为所谓不平衡意味着uu = uv= uw这个条件无法满足,即三相电压幅值不相等。
有人认为所谓不平衡意味着uu + uv+ uw = 0这个条件无法满足,即三相电压相加不为零。
这些说法都不能算错,但是作为一个矢量控制的狂热死忠脑残粉,邵博士还是愿意从矢量的角度来定量地阐述一下所谓的“不平衡”。
3.2.1公式表达
G100《矢量控制基本原理简介》确实是呕心沥血之作(这篇巨作我一直没有决定要不要放到小课堂来,但是如果加入赛思亿以后,大家就可以随便看,甚至还可以让邵博士亲自教。。。),然而这篇文档仅仅阐述了三相电压平衡、参数平衡的交流系统。对于不平衡系统并没有涉及。
在G100《矢量控制基本原理简介》中,三相电压是平衡的、幅值相等的、相位差120°的,即:
很可惜,这并不是故事的全部。这个三相系统实在太理想了。在真实的世界中,三相电压是平衡的、幅值相等的、相位差120°,这3个条件,往往一个都不能满足。
一个三相系统的最通用的描述,其实可以写成下面的公式:

3.2.2 矢量理解
为了可以进一步理解下面的描述,邵博士衷心希望读者是已经阅读了G100《矢量控制基本原理简介》之后再看本文的。
G100《矢量控制基本原理简介》说道,可以用一种矢量对三相电压进行表达。从上述公式来说,电压被拆分成了3个部分,分别是正序电压、零序电压和负序电压。
-
3.2.2.1 正序电压
正序电压表述如下:
很显然,这个正序电压完全符合了G100《矢量控制基本原理简介》中对于完美的三相电压是平衡的、幅值相等的、相位差120°的定义。那么其静止坐标系下矢量化表达,具体如何表达参见 图表 1,该矢量的长度是|u|+,采用逆时针的方向旋转,且旋转角频率是ω。
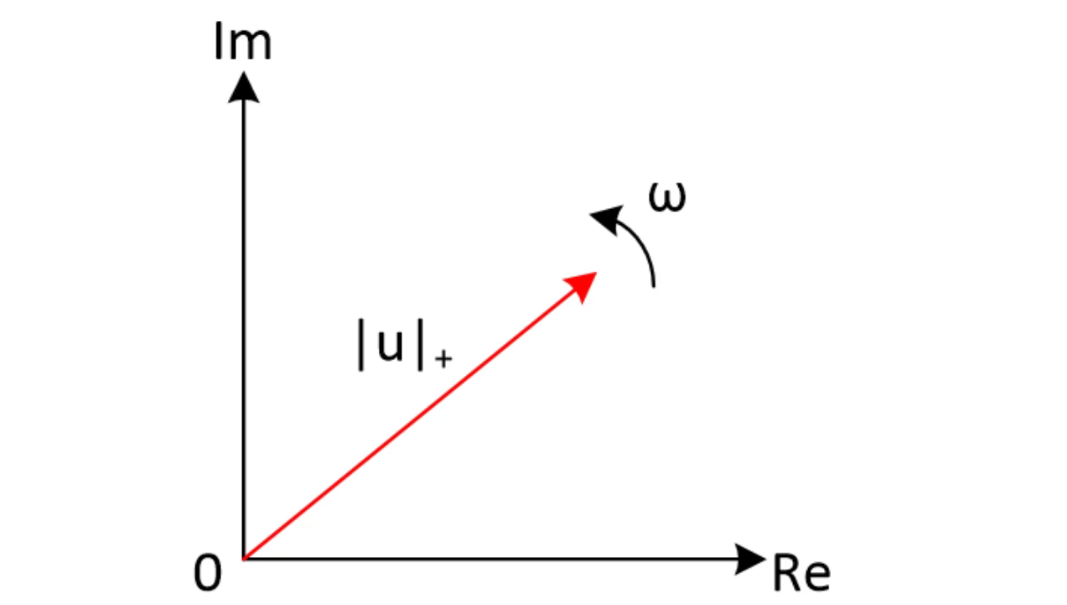
图表 1 正序电压的矢量化表达
-
3.2.2.2 零序电压
零序电压表述如下:
零序电压被认为是三相电压叠加在一起之后所形成的电压。这个电压在静止坐标系下的矢量化表单参见图表 2。该矢量的长度是|u|0,被认为是相对静止的一个矢量,或者说角频率是0的矢量,又或者说是直流矢量。
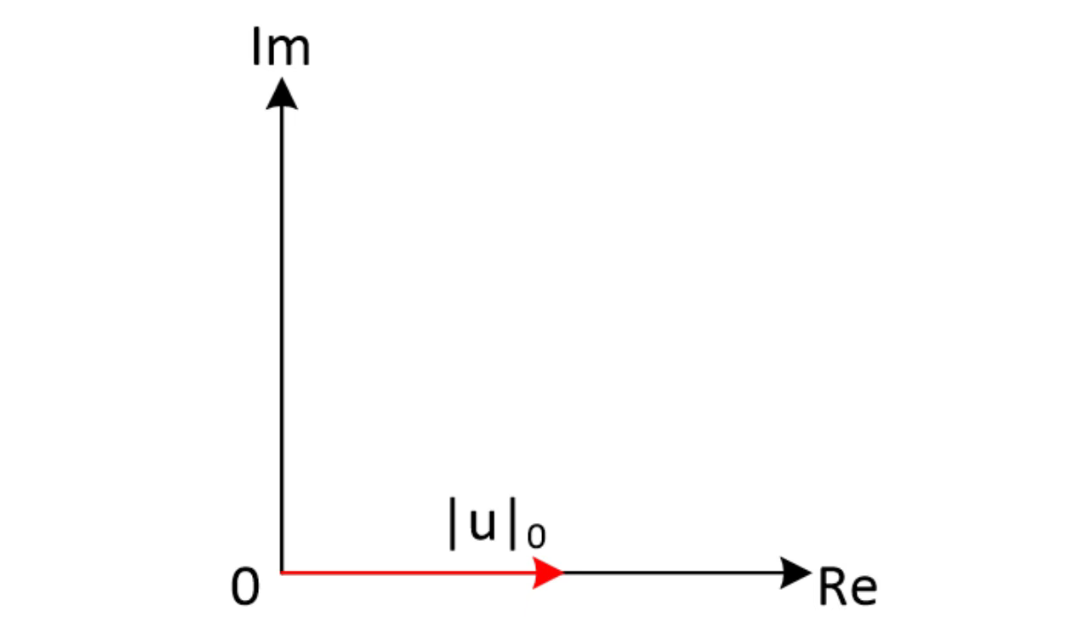
图表 2 零序电压的矢量化表达
在一个三相系统里面,在大部分情况下零序电压往往并不能体现出任何的作用,因为三相绕组大多数采用星型或者三角型的连接,三个相同的电压作用在变压器或者电机绕组上,往往并没有太大的卵用,理论上不会产生电流和磁链,因此这个电压可以忽略不计。
用另一种语言表述一下,对变压器的原边施加零序电压,变压器的副边并不会感应出任何东西来……,这也是变压器虽然大、笨、重,但是我们还是挺喜欢变压器的原因。
既然本文档集中于三相系统的描述,因此本文不对零序电压做过多的描述。
然而作为题外话,当零序电压的幅值|u|0是变化的,特别是高频变化的时候,这个零序电压有了另一个威风凛凛的名字,叫做:“共模电压”。这个共模电压成为了实际工程经验中令人烦恼的存在。简单岔开话题,共模电压的是80%以上的电磁兼容问题的罪魁祸首,而且具有测不准算不准等特点,在我赛能研究明白共模电压的只有岳博士,其他人(包括乌博士)都一知半解只会用模型仿真。截止于2022年3月15日,我赛的“/研发中心/我赛亚太研究院/综合试验报告/”文件夹中,就有如下的关于共模的报告:
-
G002《网侧并网的共模电压试验报告》
-
G025《锂电池柜共模滤波器设计选型》
-
G026《共模电压及其抑制方式的理论分析和试验验证》
-
G031《针对690客位项目共模滤波器设计的Simulink和Mathcad仿真模型的比较和验证》
只能说,天下苦共模久矣。然而本文档并不是讨论共模的,所以我们就暂时放过零序电压了,可能哪天会开一集连续剧专门讲共模。
-
3.2.2.3 负序电压
负序电压表述如下:
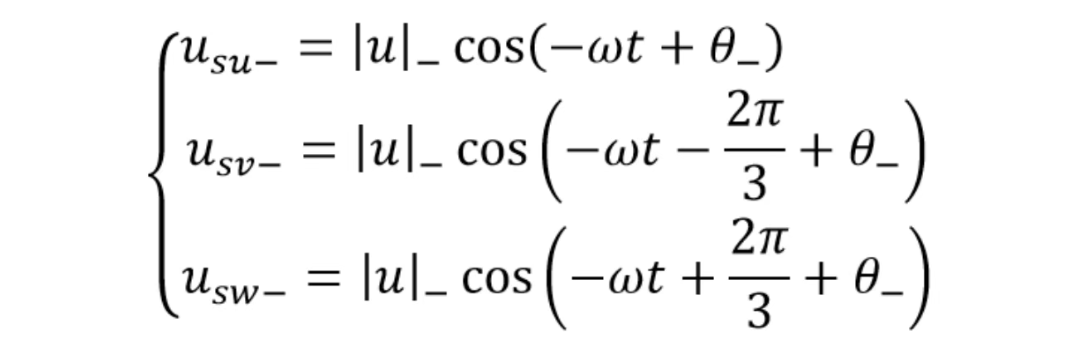
很显然,这个负序电压也同样完全符合了G100《矢量控制基本原理简介》中对于完美的三相电压是平衡的、幅值相等的、相位差120°的定义。那么其静止坐标系下矢量化表达参见图表 3,该矢量的长度是|u|-,采用逆时针的方向旋转,且旋转角频率是-ω,或者说采用顺时针的方向旋转,且旋转角频率是ω。
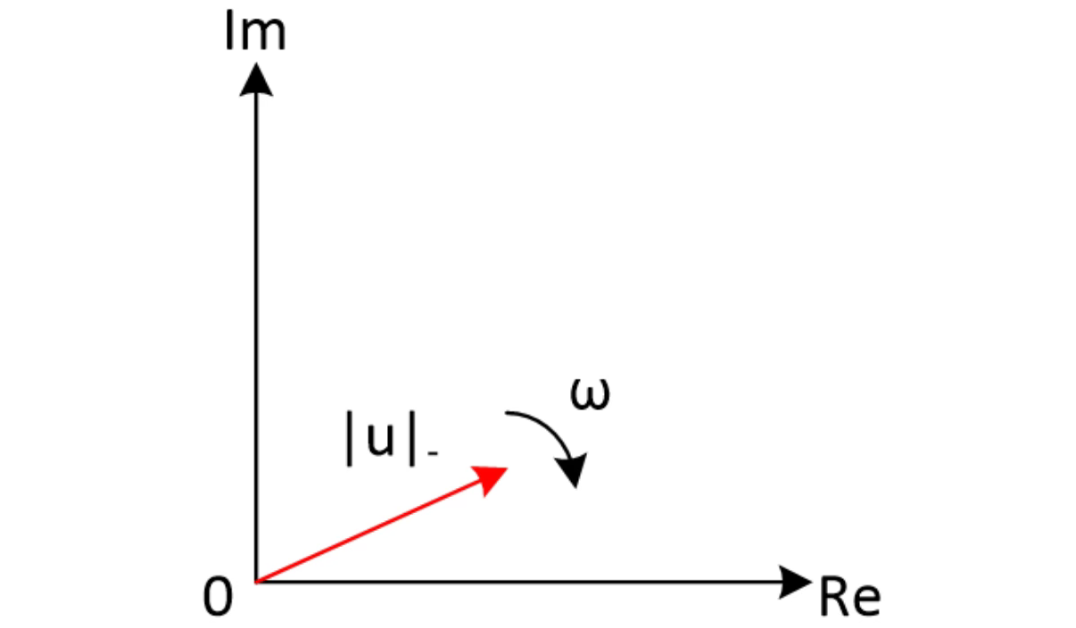
图表 3 负序电压的矢量化表达
这里出现了一个概念,叫做负频率,或者说顺时针旋转的矢量。这个概念怎么听怎么抽象,事实上邵博士在苦逼地本科学习过程中,对负频率这个概念就一直很模糊。
现在这里简单谈一下邵博士对于负频率的理解。学过高中三角函数的,都知道cos(-x) = cos(x)的道理,所以负序电压又可以表达为:
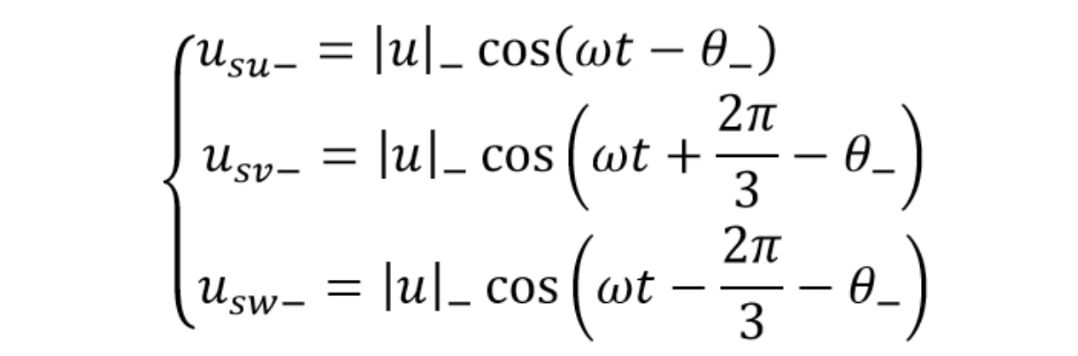
令人惊讶的事情发生了,所谓的负频率或者负序矢量,也是和正频率或者正序矢量的描述相当接近,唯一的区别在于:三相的相序顺序变化了!
3.2.3 通用三相系统的矢量表达
假设不考虑零序电压了,那么通用的三相系统的矢量表达可以参见图表 4,即由一个幅值是|u|+,采用逆时针的方向旋转,且旋转角频率是ω的矢量和一个幅值是|u|-,采用顺时针的方向旋转,且旋转角频率是ω的矢量叠加形成。
由于本定义忽视了零序电压,因此通用三相系统的电压叠加永远是0。换句话说,任何叠加为0的三相系统,都可以分拆为正序矢量和负序矢量的叠加。
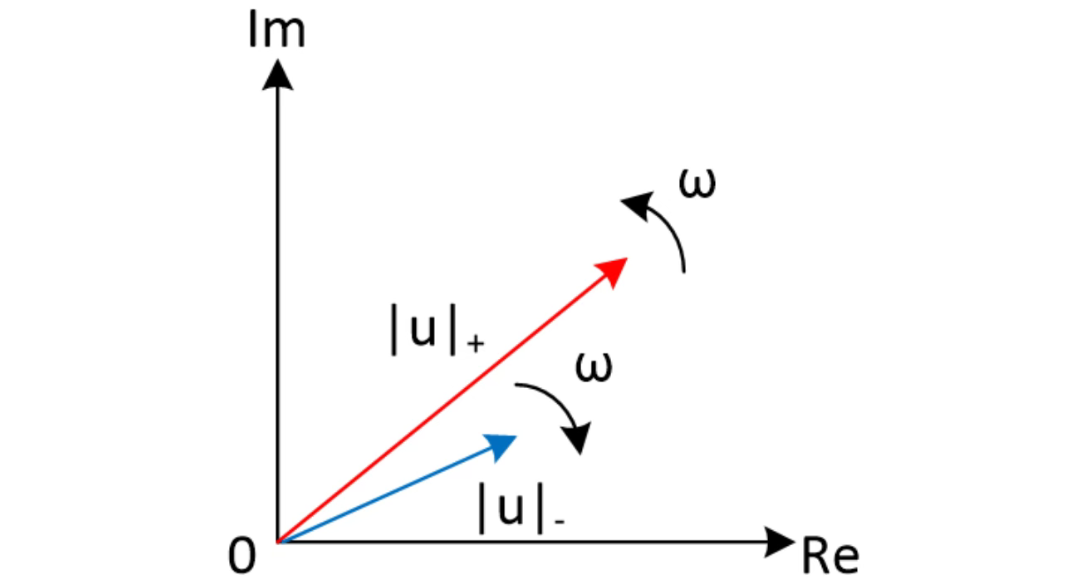
图表 4 通用三相系统的矢量表达
3.2.4 一些仿真
能坚持到目前为止的同学,想必有一颗坚忍的心,或者深爱控制,或者兼而有之。
为了奖励大家的坚持,邀请大家加入船舶新能源动力小课堂-交流研讨群,如果你觉得邵博士说的不对或者不全面,你可以在群里提问或者当众怼他。。。
为了更形象地对不平衡进行描述,有必要使用仿真。
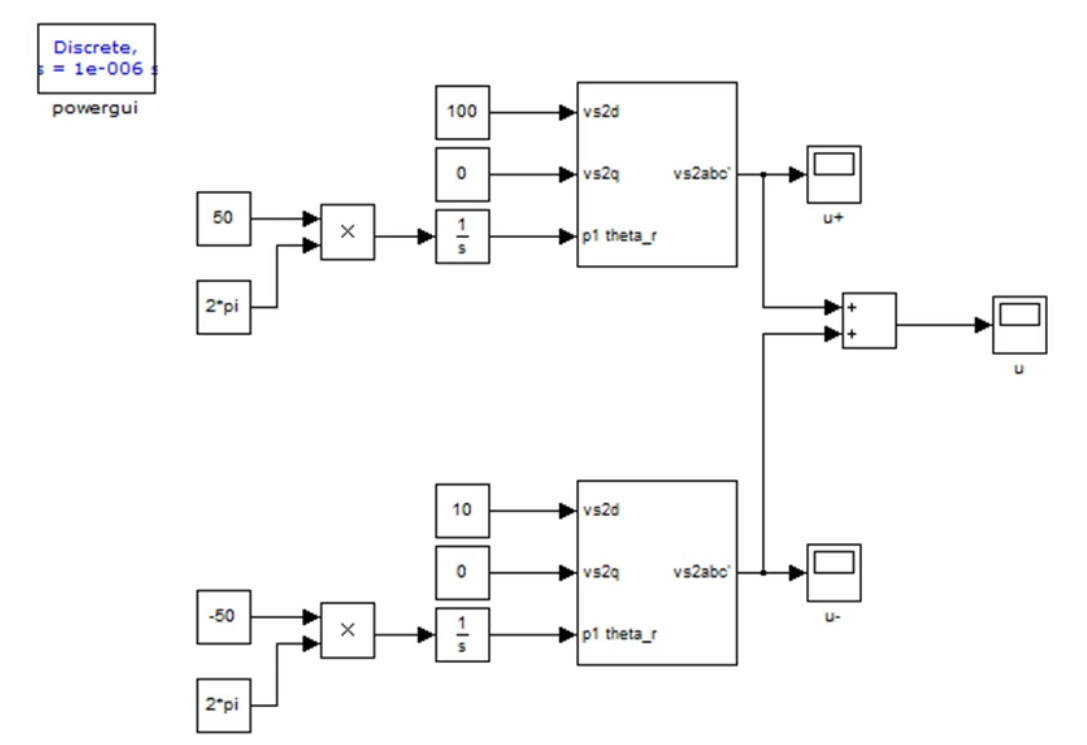
图表 5 针对通用三相系统的仿真模型
图表 5给出了频率为50Hz的100V正序和-50Hz的10V负序之间的叠加。
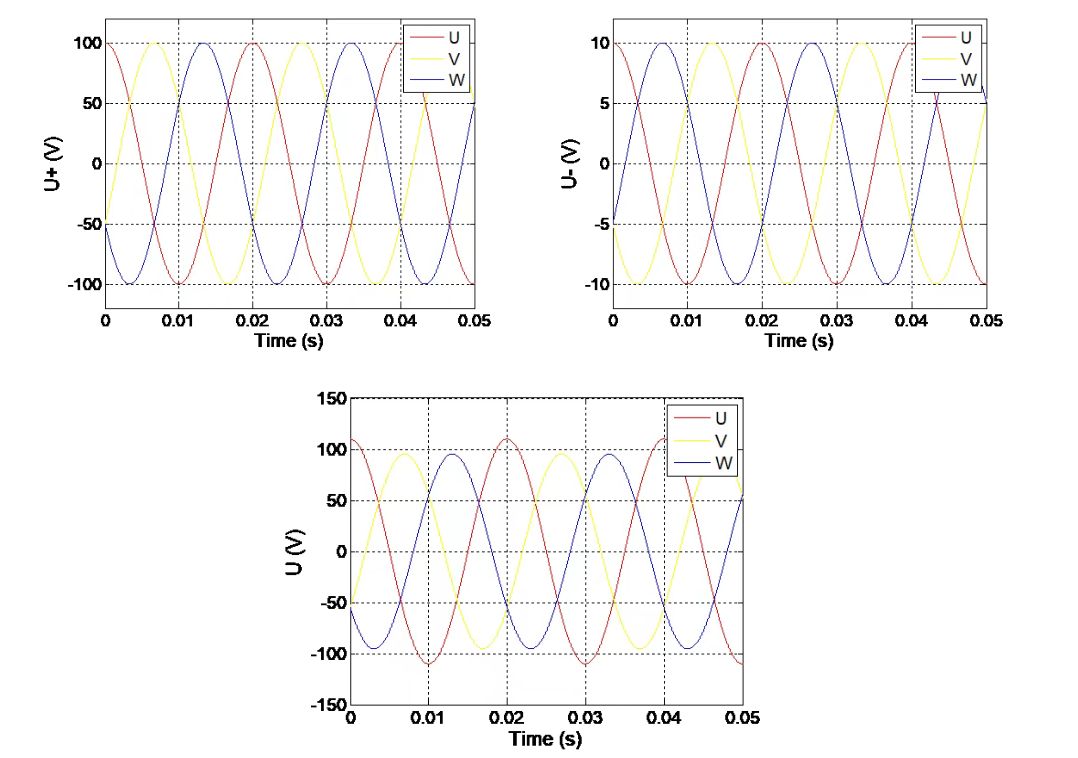
图表 6 电压波形
(左上:正序矢量,右上:负序矢量,下:总矢量)
从图表 6可以看到,负序矢量,或者说负频率造成的结果,就是三相电压的相序相反。最后叠加的结果,造成了所谓的“三相电压不平衡”。
希望这个仿真可以给同学们一个比较直观的认识。
3.3.1 不平衡度的定义
现在我们回到一开始的“不平衡”的说法。所谓的平衡系统,就是指仅存在正序矢量的三相系统。所谓的不平衡系统,就是既有正序矢量,又有负序矢量的三相系统。
看到一个波形,有人说:“这个波形很平衡”,有人说:“这个波形不甚平衡”。这种太不科学了。就好比THD可以用来量化“正弦度”,不平衡度也有自己的量化公式。
不平衡度ε的定义比较多,适用于我们的情况的最典型的公式是:
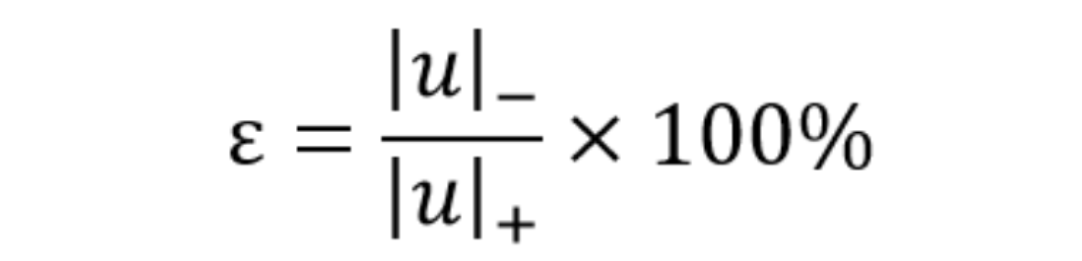
如果从这个角度来说,2.2.4给出的例子中,不平衡度是10%。这已经是一个比较厉害的不平衡度了。一般认为不平衡度小于5%是一个比较平衡的系统。
3.3.2 不平衡度的感性认识
用图形看看不平衡度会更加直观一些。参见图表 7。可以看到,不平衡度改变的不仅是三相的幅值,三相之间的相位也被深刻地改变了。
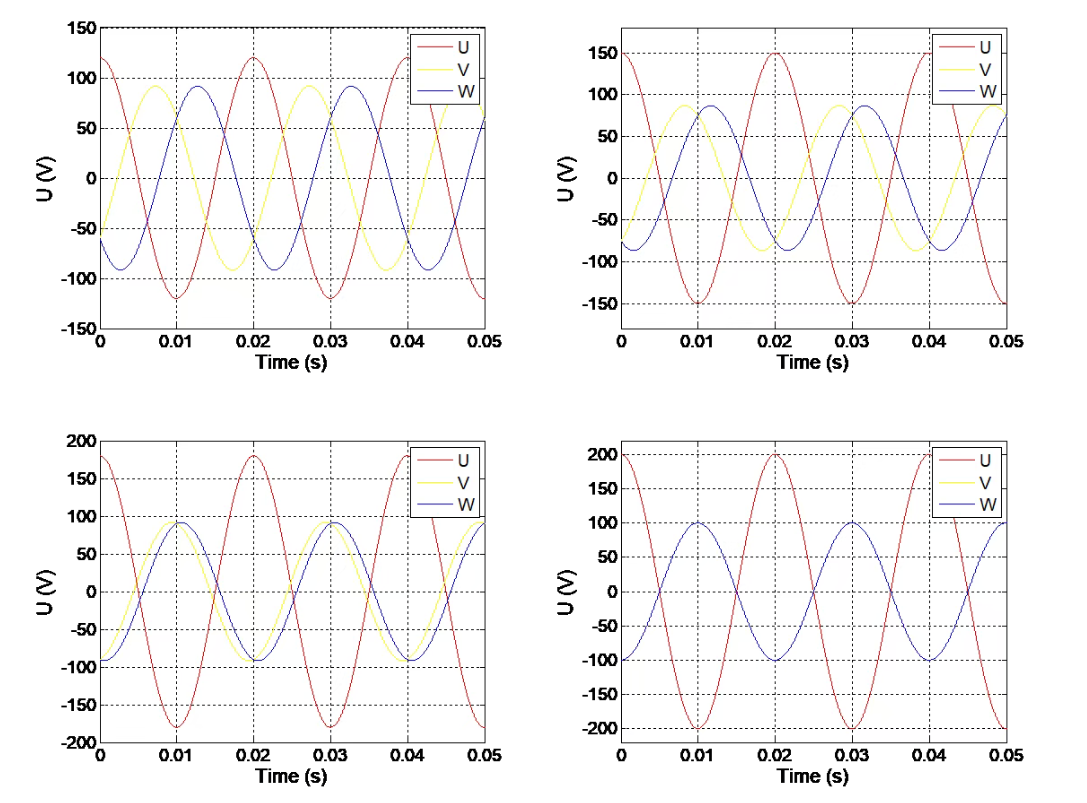
图表 7 不同的不平衡度下的三相电压波形
(左上:ε = 20%,右上ε = 50%,左下,ε = 80%,右下,ε = 100%)
04
不平衡对于系统的影响
这里重点描述,不平衡的系统,究竟对于系统会产生什么影响。
首先,我们分析一下产生不平衡的原因。我们先假设一个最简单的系统,即三相电源施加到一个三相负载之上。我们考察三相电源的电压和三相负载的电流,以及电源输出到负载上的功率。
4.1.1 负载不平衡
第一种不平衡的原因,就是负载的不平衡。即假设我们拥有了完美的平衡三相电源,但是因为负载本身或者传输线路的不一致,导致了负载本身体现出了不平衡。
-
4.1.1.1 仿真模型
理论较为苍白,仿真更加直观。一个简单的仿真模型参见图表 8。
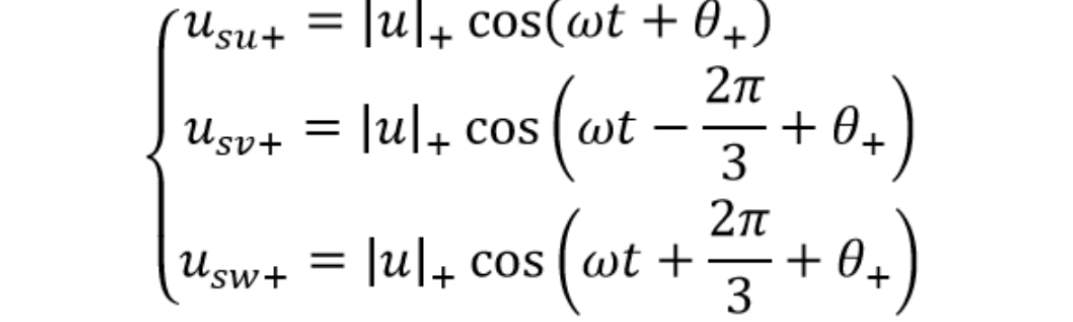
在图表 8的模型中,V1~3的电压源是理想平衡的,公式为:
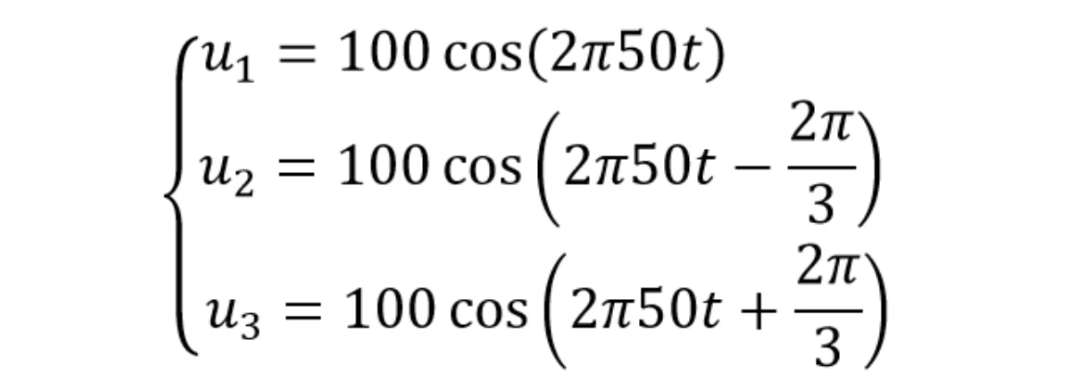
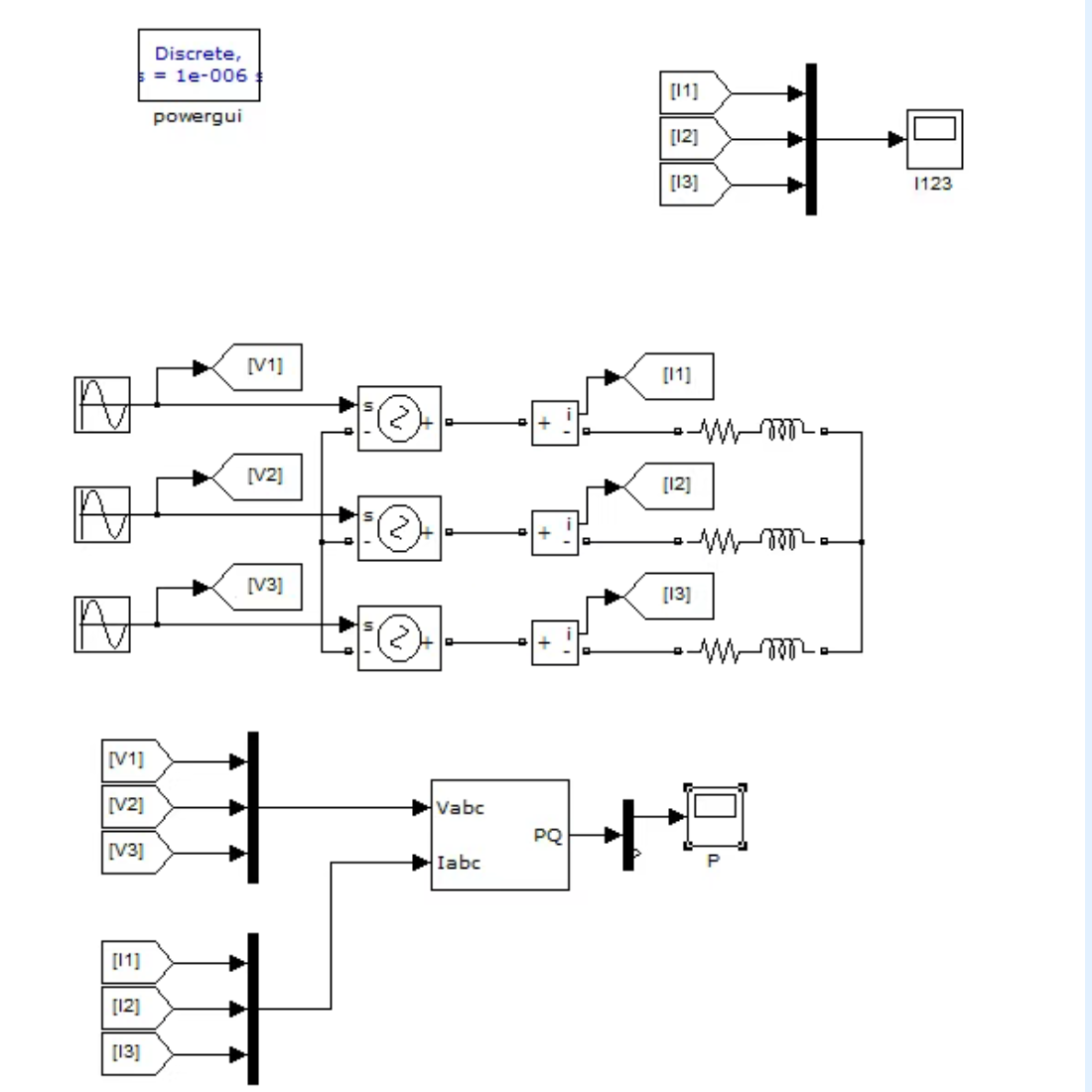
图表 8 负载不平衡仿真模型
-
4.1.1.2 平衡负仿真结果
后先进行平衡负载的仿真,假设UVW三相负载均为1Ω的电阻和10mH的电感串联,则可以读取三相电流和有功功率的输出参见图表 9。可以看到,三相电流是平衡的,而且有功功率是一个恒定值,类似的描述在G100《矢量控制基本原理简介》也有涉及。
图表 9 负载平衡条件下的仿真结果
-
4.1.1.3 不平衡负仿真结果
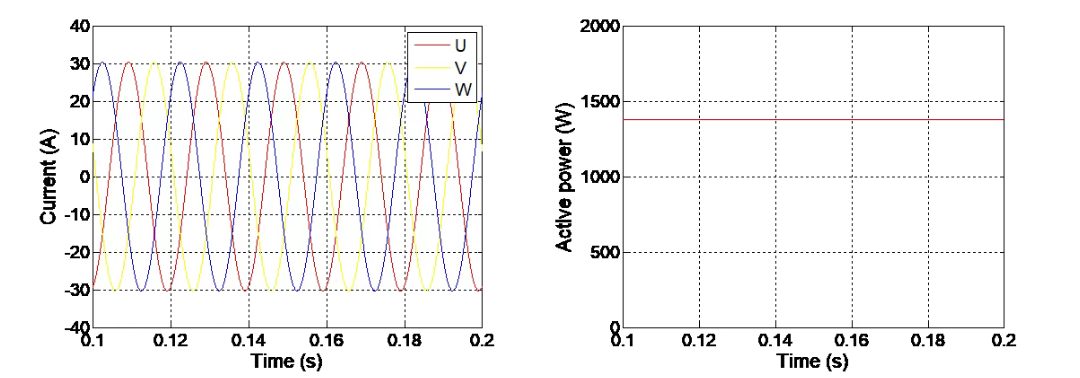
人为修改负载参数,将U相负载改为0.8Ω的电阻和8mH的电感串联,而V和W相负载仍然是为1Ω的电阻和10mH的电感串联。此时可以认为三相负载不均衡了,则得到的电流和有功功率的波形参见图表10。
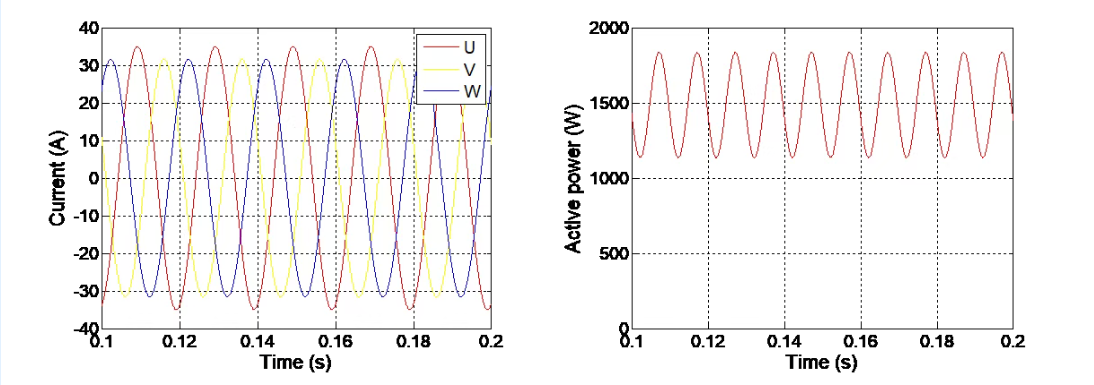
图表 10 负载不平衡条件下的仿真结果
从电流上来说,其电流波形很接近ε = 10%的图表 6所示的波形,而功率则体现出了在平均的1.4kW附近产生了振荡,且振荡频率是基频50Hz的2倍,即100Hz。
-
4.1.1.4 仿真小结
这个仿真告诉我们,平衡的系统会产生恒定的功率输出,不平衡的系统会在恒定功率输出的基础上,额外产生2倍基频的功率输出。
4.1.2 电压源本身不平衡
另一种不平衡的来源,是不平衡的电压源加到了平衡的负载上。显而易见的是,此时系统更加复杂。事实上,在绝大部分的真实系统中,电源和负载都不平衡。
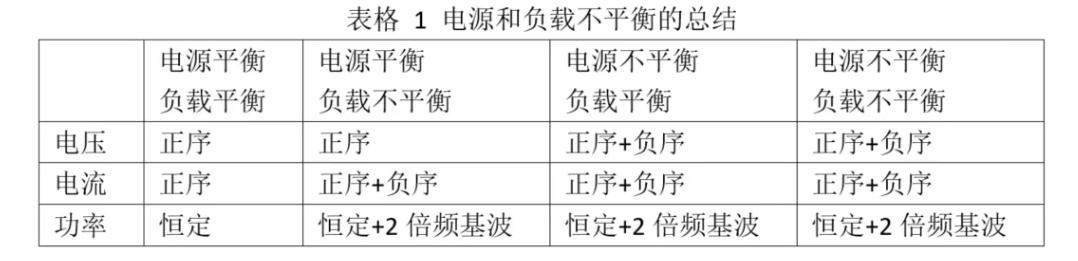
我们将几种情况总结在表格 1中。
4.2.1基本介绍
表格 1直接给出了结论。为了更好地进行数学总结,同时体现出本文档的专业和严谨,这一部分给出了有功功率的理论计算过程。
不失一般性,假设电压和电流都同时具有正序矢量和负序矢量,即:

那么从矢量的角度来说,功率就是:

4.2.2 叠加定理
上述的计算,本质上体现出了一个概念,即叠加定理。叠加定理认为,一个正序(u+)+负序(u-)的矢量电压,施加到一个线性时不变系统(用人话说就是由RCL组成的电路网络)中,可以分别用正序电压(u+)施加于该系统得到电流的正序激励(i+),再用负序电压(u-)施加于该系统得到电流的负序激励(i-)。正序电流激励和负序电流激励的矢量和就是电流值。
-
于此同时,有功功率可以继续拆分,分为:正序电压u+和正序电流i+相乘(点乘)得到的有功功率分量P++;
-
正序电压u+和负序电流i-相乘(点乘)得到的有功功率分量P+-;
-
负序电压u-和正序电流i+相乘(点乘)得到的有功功率分量P-+;
-
负序电压u-和负序电流i-相乘(点乘)得到的有功功率分量P--。
最终的有功功率,是上述4种功率分量的代数和,即P = P++ + P+- + P-+ + P--。
4.2.3 正序电压和正序电流的计算
用数学的方式来简单算一算正序电压u+和正序电流i+相乘(点乘)得到的有功功率分量。
假设三相电压的正序分量为:
假设三相电流的正序分量为:
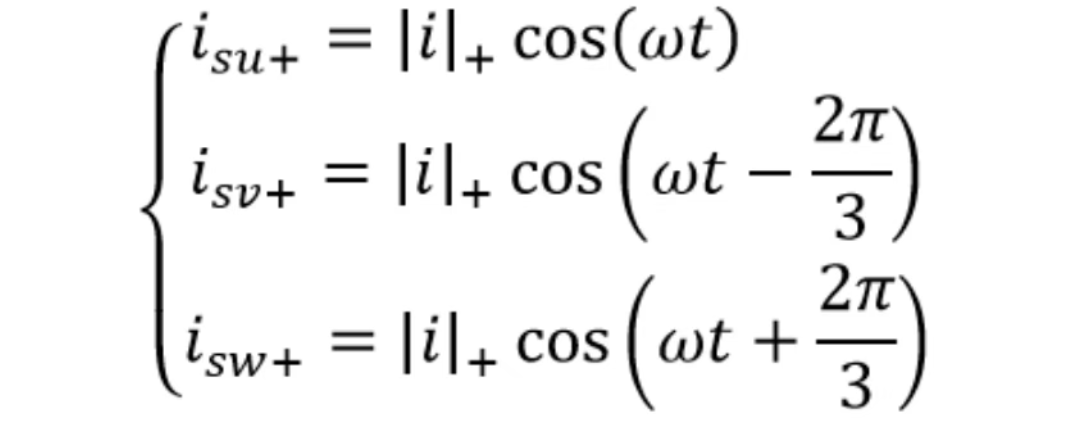
正序电压u+和正序电流i+相乘(点乘)得到的有功功率分量P++计算为(如果对于三角积化和差不了解的,可以翻阅一下高中数学教科书,在1999年上海卷高考,这属于必修部分):
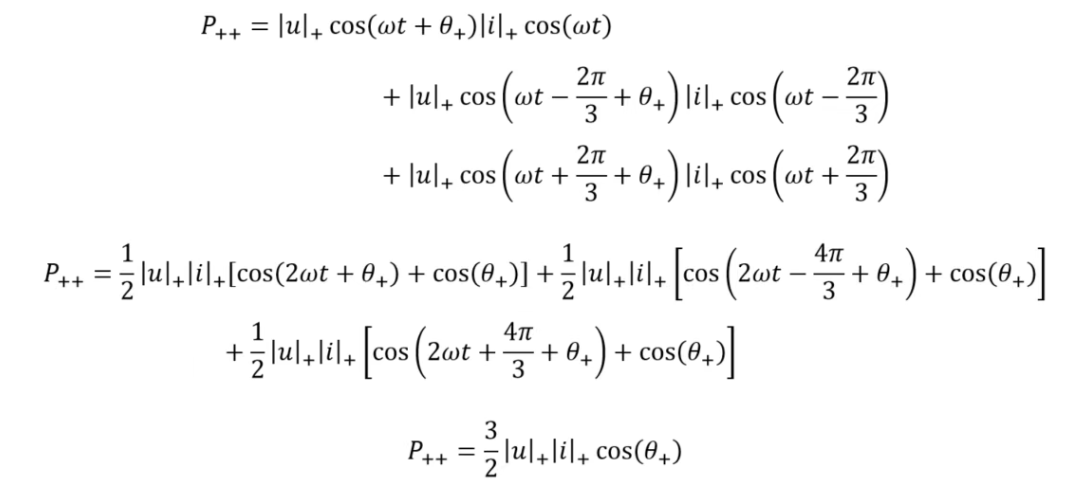
这个计算过程反映出了一个神迹,即平衡的三相电压和三相电流,可以得到恒定不变的有功功率,这也是我们可以利用变换的三相交流电,可以得出一个稳定的负载输出的原因(例如稳定恒定的推进器功率等),但是负序可能就不一样了。
4.2.4 正序电压和负序电流的计算
用数学的方式来简单算一算正序电压u+和负序电流i-相乘(点乘)得到的有功功率分量。
假设三相电压的正序分量为:
假设三相电流的负序分量为:
正序电压u+和负序电流i-相乘(点乘)得到的有功功率分量P+-计算为:
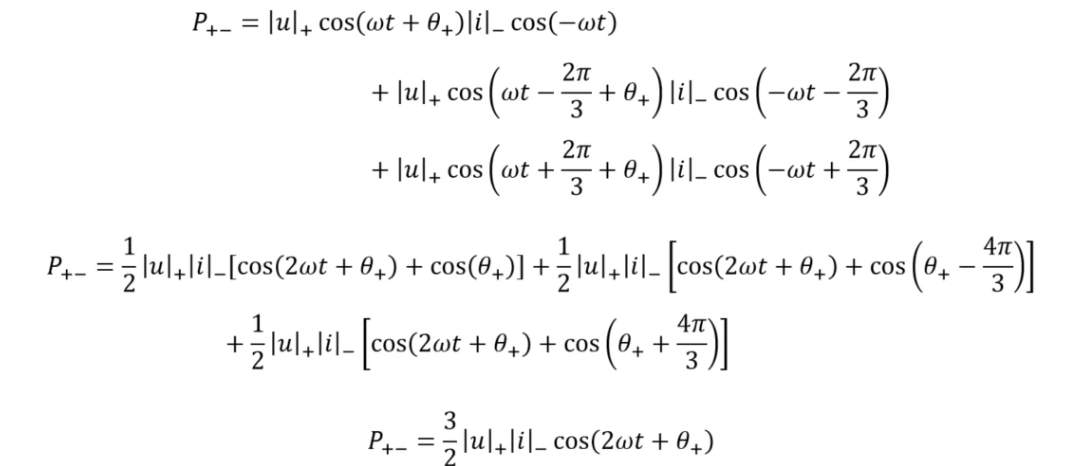
神奇的地方出来了,这个骚计算告诉我们,一个正序的电压和一个负序的电压,会得到一个2倍基频抖动的有功功率。这个有功功率经过一个周期,总体的做功毫无任何卵用,被平均成0了,在稳态计算中甚至可以忽略不计,但是可能给我们造成很多困扰,比如说推进功率中的转矩抖动,带来很多客户很讨厌的额外的振动、噪声和无用的功耗,甚至破坏一些功率转换设备。
上述计算也告诉我们,对于一个实际的频率为50Hz的三相系统,总是难以避免地出现100Hz的杂碎,这些杂碎会在有功功率、无功功率甚至直流母线电压等变量中有所体现!
到这里其实很多同学已经很有收获了,也已经很累了,如果太累的话可以休息一下,明天从头再读到这里并且继续。但下面的内容对很多实质性科研甚至控制代码的编写起到重要作用,所以请学有余力的同学坚持一下。
4.2.5 功率计算总结
将上述的分析,扩展到整体的功率计算,可以总结到:
-
正序电压u+和正序电流i+相乘(点乘)得到的有功功率分量P++,幅值为1.5|u|+|i|+,频率为直流。
-
正序电压u+和负序电流i-相乘(点乘)得到的有功功率分量P+-,幅值为1.5|u|+|i|-,频率为2f。
-
负序电压u-和正序电流i+相乘(点乘)得到的有功功率分量P-+,幅值为1.5|u|-|i|+,频率为2f。
-
负序电压u-和负序电流i-相乘(点乘)得到的有功功率分量P--,幅值为1.5|u|-|i|-,频率为直流。
-
考虑到对于一般的三相系统中,总体平衡度还是很高的,ε < 5%,那么就有|u|+ >> |u|-,且|i|+ >> |i|-。于是可以得到P++ >> P+- ≈ P-+ >> P--。
05
矢量角度理解不平衡
任何三相的电压或电流可以用旋转的矢量来表征。矢量的旋转,又和本身所在的坐标系有关。坐标系的变换,可以参见G100《矢量控制基本原理简介》。
在静止坐标系中,通用的三相系统的矢量表达可以参见图表 4,即由一个幅值是|u|+,采用逆时针的方向旋转,且旋转角频率是ω的矢量和一个幅值是|u|-,采用顺时针的方向旋转,且旋转角频率是ω的矢量叠加形成。
和G100《矢量控制基本原理简介》表述不同,矢量本身分为正序矢量和负序矢量,所以所谓的同步旋转坐标系,又分为了正序同步旋转坐标系和负序同步旋转坐标系。
5.2.1 正序同步旋转坐标系
如果矢量被变换到正序同步旋转坐标系上,可以参见图表 11。
正序矢量在正序同步旋转坐标系上是静止的,而负序矢量在正序同步旋转坐标系上以-2ω的频率旋转(或者说以2ω的频率顺时针旋转)。
所以在正序同步旋转坐标系上,一个通用的矢量可以表达为一个静止的幅值为|u|+的矢量和一个以-2ω的频率旋转的幅值为|u|-的矢量叠加。
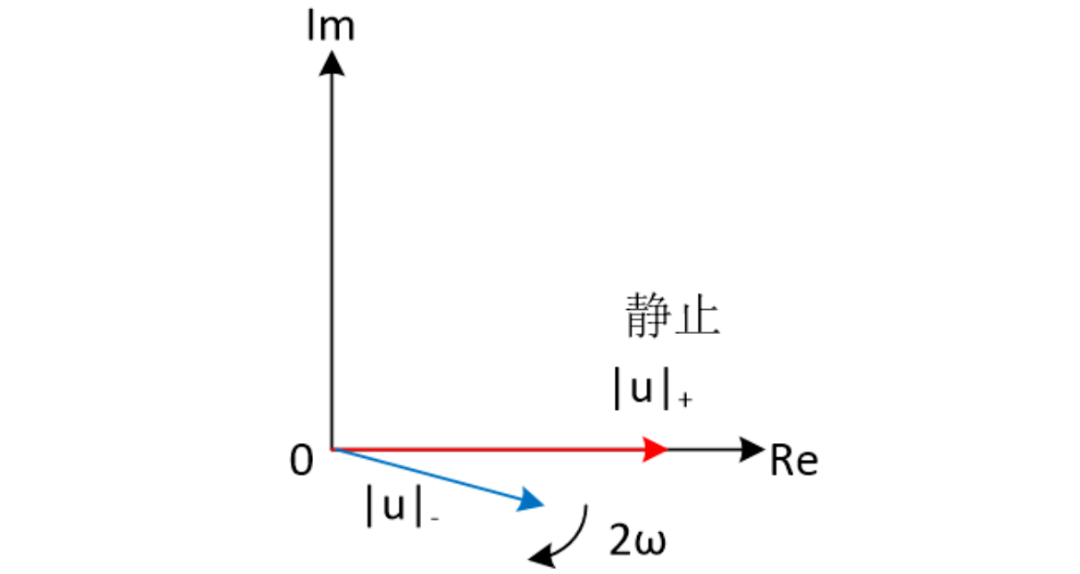
图表 11 正序同步旋转坐标系下的矢量
如果矢量被变换到负序同步旋转坐标系上,可以参见图表 12。
负序矢量在负序同步旋转坐标系上是静止的,而正序矢量在正序同步旋转坐标系上以2ω的频率旋转(逆时针)。
所以在正序同步旋转坐标系上,一个通用的矢量可以表达为一个静止的幅值为|u|-的矢量和一个以2ω的频率旋转的幅值为|u|+的矢量叠加。
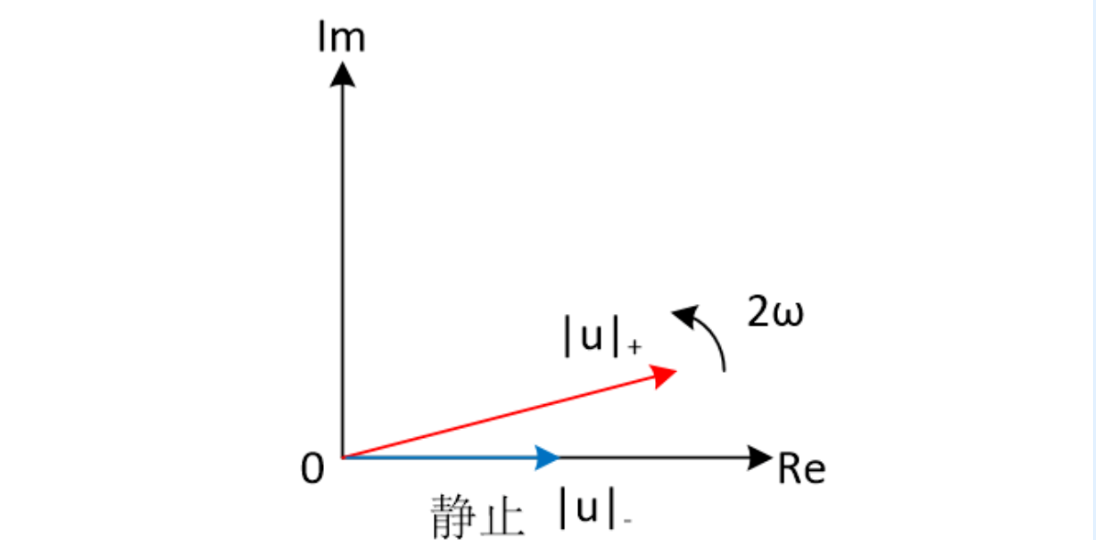
图表 12 负序同步旋转坐标系下的矢量
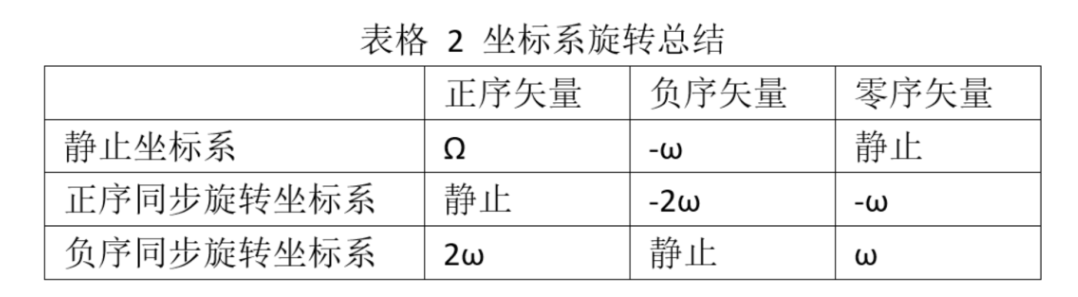
简单讲上述的坐标变换进行小结,可以参见表格 2。
06
正负序矢量的量化提取方法和应用意义
6.1.1 基本方法
正负序分量的量化提取方法有一定的路线之争,这里仅给出邵博士比较熟悉的方式。
从表格 2(零序矢量有点超纲,后面的表述对这一部分华丽地无视),我们一般用如下的方式进行处理:
-
将矢量转换进入正序同步旋转坐标系,然后滤除2ω的谐波,剩下的直流分量即可以代表正序分量
-
将矢量转换进入负序同步旋转坐标系,然后滤除2ω的谐波,剩下的直流分量即可以代表负序分量
6.1.2 滤波器设计
从4.1.1可以看到,提取正负序的分量,关键在于滤除2ω的谐波,而保留直流的分量。
可以考虑的方式是低通滤波器,或者带阻滤波器。
低通滤波器的介绍可以参考G112《拉普拉斯和傅里叶那些事儿》。这里主要介绍带阻滤波器。带阻滤波器主要目的是滤除一个特定的频率,比较适合特征频率比较固定的应用之中。以我们的应用来说,如果是电网类应用,频率是比较固定的50Hz或者60Hz,那么负序的频率也是固定的100Hz或者120Hz,那么使用带阻滤波器会更加合适。以50Hz应用为例,一个典型的滤除100Hz的带阻滤波器可以设计成:
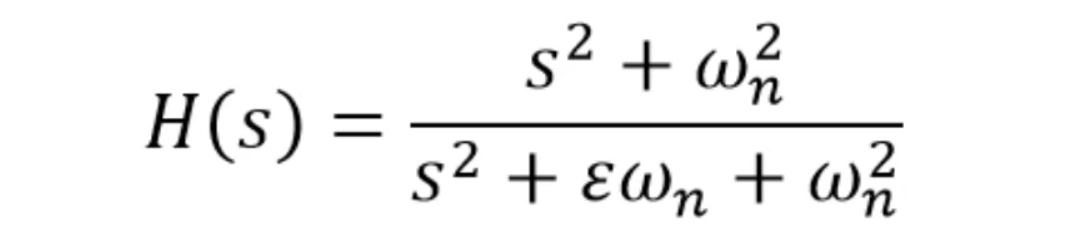
ε提供了一个特殊的自由度,有兴趣的可以百度一下“品质因数”,这里不做展开了。带阻滤波器的幅频响应可以参见图表 13。可以看到,在100Hz出现了极大的抑制,ε的取值在一定程度上决定了阻带的宽度,由设计者在在目标频率的抑制程度和非目标频率的保护程度之间进行妥协。我赛的标准带阻滤波器取取ε = 0.1。
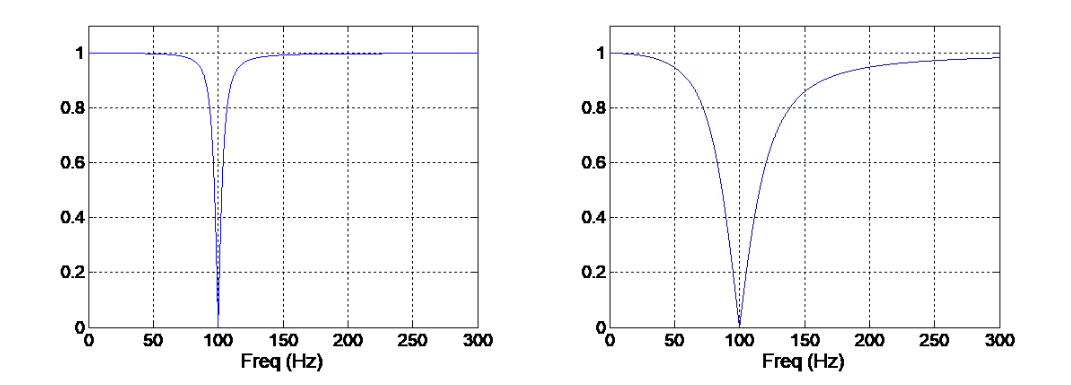
图表 13 带阻滤波器的幅频响应
(左:ε = 0.1,右:ε = 0.5)
7.1.3 数字滤波器设计
前面说的都是基于连续时间域的滤波器设计,而实际实现往往是基于数字信号的,所以这里简略说一下关于数字的实现方式。这一部分属于“数字信号处理”这门学科了,和我赛的主要技术内容关联性不大,这里仅仅做一般知识上的描述。
数字滤波器一般分为IIR和FIR两种:
-
无限脉冲响应滤波器是数位滤波器的一种,简称IIR数位滤波器(infinite impulse response filter)。由于无限脉冲响应滤波器中存在反馈回路,因此对于脉冲输入信号的响应是无限延续的。
-
有限脉冲响应滤波器是数字滤波器的一种,简称FIR数字滤波器(finite impulse response filter)。这类滤波器对于脉冲输入信号的响应最终趋向于0。
IIR滤波器的设计主要适用于已知的模拟滤波器的数字化,因此我赛的滤波器设计都是采用IIR滤波器。也就是先根据5.1.2进行滤波器的设计(可以是低通滤波器或者带阻滤波器),然后将连续域转换成离散域。
转换的方式很多,我赛采用的是双线性变换的方式,由于和我赛的主要内容差距过大,因此具体可以百度一下。
目前我赛的应用中,研究不平衡度或者负序,主要有2个应用,分别是:
-
AFE应用中对缺相的检测,可以参见G202《AFE前端换相以及缺相的研究与分析》
-
发电机/电动机的差动保护,可以参见G116《发电机和电动机的差动保护及实现》
在我赛PPB的底层保护中,还有所谓的“三相电流不平衡”,事实上这个电流是用来检测零序电流的,只是简单地将三相电流加在一起。
在讲清了原理之后,下一集将围绕《发电机和电动机的差动保护及实现》,包括在变频技术发展过程中,针对原有传统发电机/电动机和现有电力推进相关电机在船级社规范方面的异同而相关原理,以及相关不同原理所来带的保护方法的异同。
下一集课程仍然围绕基本原理展开,所以还属于懂与不懂,都是收获范畴。

乌博士课后结语
SUMMARY
乌博士不知道从哪儿听到一句话“这个时代是科技平权的时代”,我觉得随着电力推进国产化的到来,这个行业也到了科技平权的时代,10年前一个Magic Number或者换一根线就能赚很多钱的时代已经过去了,以前我在外企的时候只要谈到技术原理就是公司机密的时代也已经过去了。
在这个信息化高度发达的时代,如果你要保持领先,已经不可能通过提高技术的神秘感所来达到目的了,唯一保持领先的方法,是比别人跑的更快,更快地理解应用场景,更大力度地投入科研,并且在控制风险地同时迭代更新在产品中。
在这个过程中,和科研能力同步成长的还有研发团队,而小课堂就是这样一个研发技术人员交流碰撞的平台。
在这个过程中,
懂与不懂,都是收获。


 苏公网安备32021402003296号
苏公网安备32021402003296号